
Driver Motor DC – atau Motor arus yang disingkat DMDC merupakan perangkat elektronik yang mengubah energi listrik menjadi energi mekanik dalam bentuk gerakan berputar. Di motor DC ada jangkar dengan satu atau lebih koil terpisah. Setiap gelung berakhir pada cincin terbelah (sakelar).
Mesinmotor.com akan mengupas materi seputar otomotif dengan judul Driver Motor DC. Dimana penjelasan akan dibahas berdasarkan Pengertian, Konsep, Konstruksidan Rangkaiannya.
Pengertian
Dengan isolator di antara sakelar, cincin split dapat bertindak sebagai sakelar bipolar (sakelar lemparan ganda).
Motor arus searah bekerja sesuai dengan prinsip gaya Lorentz, yang menurutnya ketika konduktor arus ditempatkan dalam medan magnet, gaya (dikenal sebagai gaya Lorentz) akan dibuat secara ortogonal antara arah medan magnet dan arah arus mengalir. Mekanisme ini ditunjukkan pada gambar berikut.
Konsep Driver Motor Dc
DMDC ialah perangkat elektronik yang mengubah energi listrik menjadi energi mekanik dalam bentuk gerakan berputar. Di DMDC ada jangkar dengan satu atau lebih koil terpisah. Setiap gelung berakhir pada cincin terbelah (sakelar). Dengan isolator di antara sakelar, cincin split dapat bertindak sebagai sakelar bipolar (sakelar lemparan ganda).
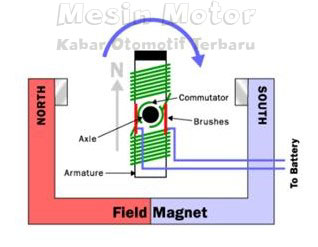
Motor arus searah bekerja sesuai dengan prinsip gaya Lorentz, yang menurutnya ketika konduktor arus ditempatkan dalam medan magnet, gaya (dikenal sebagai gaya Lorentz) akan dibuat secara ortogonal antara arah medan magnet dan arah arus mengalir. Mekanisme ini ditunjukkan pada gambar berikut.
Rangkaian Driver Motor DC
Motor arus searah yang digunakan dalam robot beroda umumnya motor searah langsung dengan magnet permanen. Motor DC tipe ini memiliki dua magnet permanen sehingga medan magnet terbentuk di antara kedua magnet tersebut.
Dalam medan magnet ini jangkar / rotor berputar. Sebuah jangkar di tengah motor memiliki jumlah ganjil dan masing-masing kumparan memiliki kumparan. Koil ini terhubung ke bidang kontak yang disebut sakelar.
Sikat dihubungkan ke kutub positif dan negatif dari energi pasokan motor ke koil sehingga kutub ditolak oleh magnet permanen yang ada di dekatnya, sedangkan kumparan lainnya akan ditarik ke arah magnet permanen lain dengan memutar jangkar.
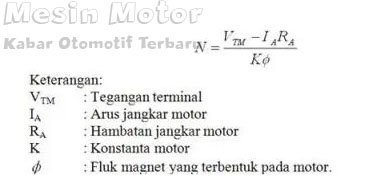
Ketika jangkar berputar, sakelar mengubah belitan yang dipengaruhi oleh polaritas medan magnet sehingga jangkar terus berputar selama kutub positif dan negatif motor dihidupkan. Kecepatan putaran motor DC (N) dirumuskan oleh persamaan berikut.
Kecepatan putaran motor DC dapat dikontrol dengan menyesuaikan tegangan terminal motor VTM. Metode yang bisa digunakan dalam mengendalikan pada kecepatan DMDC Ialah PWM atau teknik modulasi lebar pulsa.
Konstruksi Rangkaian Driver Motor DC H-Bridge MOSFET
H-bridge merupakan perangkat keras dalam bentuk sirkuit yang berfungsi untuk menggerakkan motor. Sirkuit ini disebut H-jembatan karena bentuk seri yang mengingat huruf H seperti pada gambar berikut.
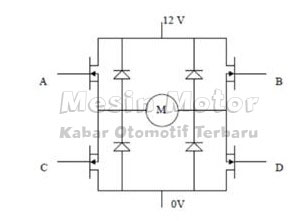
Susunan Driver Motor DC H-Bridge MOSFET
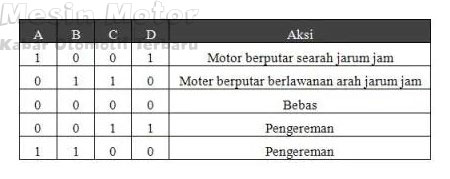
Susunan ini terdiri dari dua MOSFET kanal-P dan dua MOSFET kanal-N. Prinsip operasi dari sirkuit ini adalah untuk mengatur hidup dan mati dari empat MOSFET. Huruf M pada gambar adalah motor DC yang harus dikendalikan. Bagian atas dari rangkaian akan dihubungkan ke sumber daya kutub positif, sedangkan bagian bawah dari rangkaian akan terhubung ke sumber daya kutub negatif.
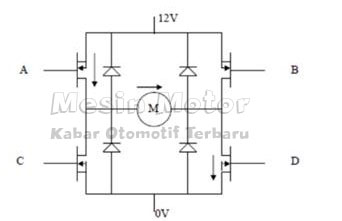
Ketika MOSFET A dan MOSFET D aktif sedangkan MOSFET B dan MOSFET C mati, sisi kiri gambar motor akan terhubung ke kutub positif catu daya, sedangkan sisi kanan motor akan terhubung ke kutub negatif dari catu daya sehingga motor akan bergerak ke arah jarum Jam dijelaskan dalam gambar berikut.
H-bridge Susuana B&C off dan MOSFET A&D On
Konfigurasi lain adalah jika MOSFET A dan MOSFET B sementara MOSFET C dan MOSFET D dinonaktifkan. Konfigurasi ini akan menyebabkan sisi kiri dan kanan motor dihubungkan ke kutub yang sama yang merupakan kutub positif sehingga tidak ada perbedaan tegangan antara kedua polaritas motor, sehingga motor akan berhenti. Konfigurasi ini disebut konfigurasi interupsi.
Demikian pula, jika MOSFET C dan MOSFET D menyala, sementara MOSFET A dan MOSFET C mati, kedua motor polaritas akan terhubung ke kutub negatif catu daya. Jadi tak ada bedaan tegangan kepada ke 2 polaritas bagian motor juga motor berhenti.
Konfigurasi juga dapat dihindari ialah ketika MOSFET C serta MOSFET A secara bersamaan atau MOSFET B dan MOSFET D secara bersamaan. Dalam konfigurasi ini, arus hubung singkat terjadi antara kutub positif catu daya dan kutub negatif catu daya.
Pengujian H-Bridge MOSFET
Nah, teman-teman saya sudah membaca teori di atas, saya harap Anda mengerti. Yah, saya akan berbagi rangkaian driver skematis dari motor MOSFET DC yang saya gunakan pada robot saya.
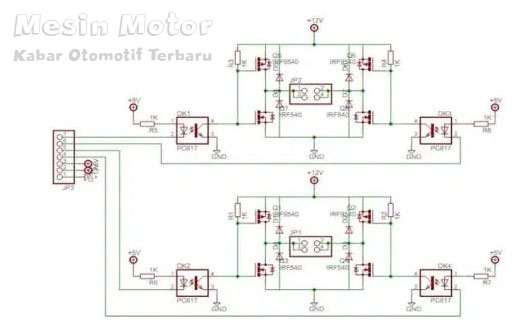
Transistor tipe MOSFET dipilih karena transistor ini terkenal dengan kemampuannya untuk mengalirkan arus yang relatif besar dibandingkan dengan transistor lain dan memiliki daya disipasi yang kecil. Sehingga transistor ini dapat menghemat konsumsi energi.
Sisi input tegangan rendah dari sisi tegangan motor dipisahkan dari coupler optik. Juga bumi untuk tegangan motor dan tegangan rendah dipisahkan. Ini untuk melindungi pengontrol dari arus kuat yang bisa terjadi jika ada komponen tegangan tinggi yang rusak.
Dan inilah desain papan (board) dari rancangan driver motor MOSFET DC.
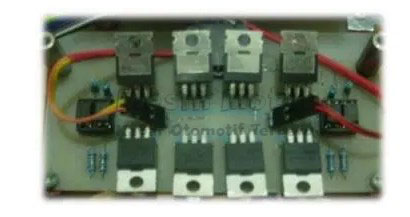
Kami berharap ini berguna untuk teman dan bisa dijadikan referensi.
Baca Juga Materi Dibwah Ini: